

-

- 产品名称:垂直多关节机器人
- 特性:
- 简介:负载:2-7kg,臂展:450-900mm
-

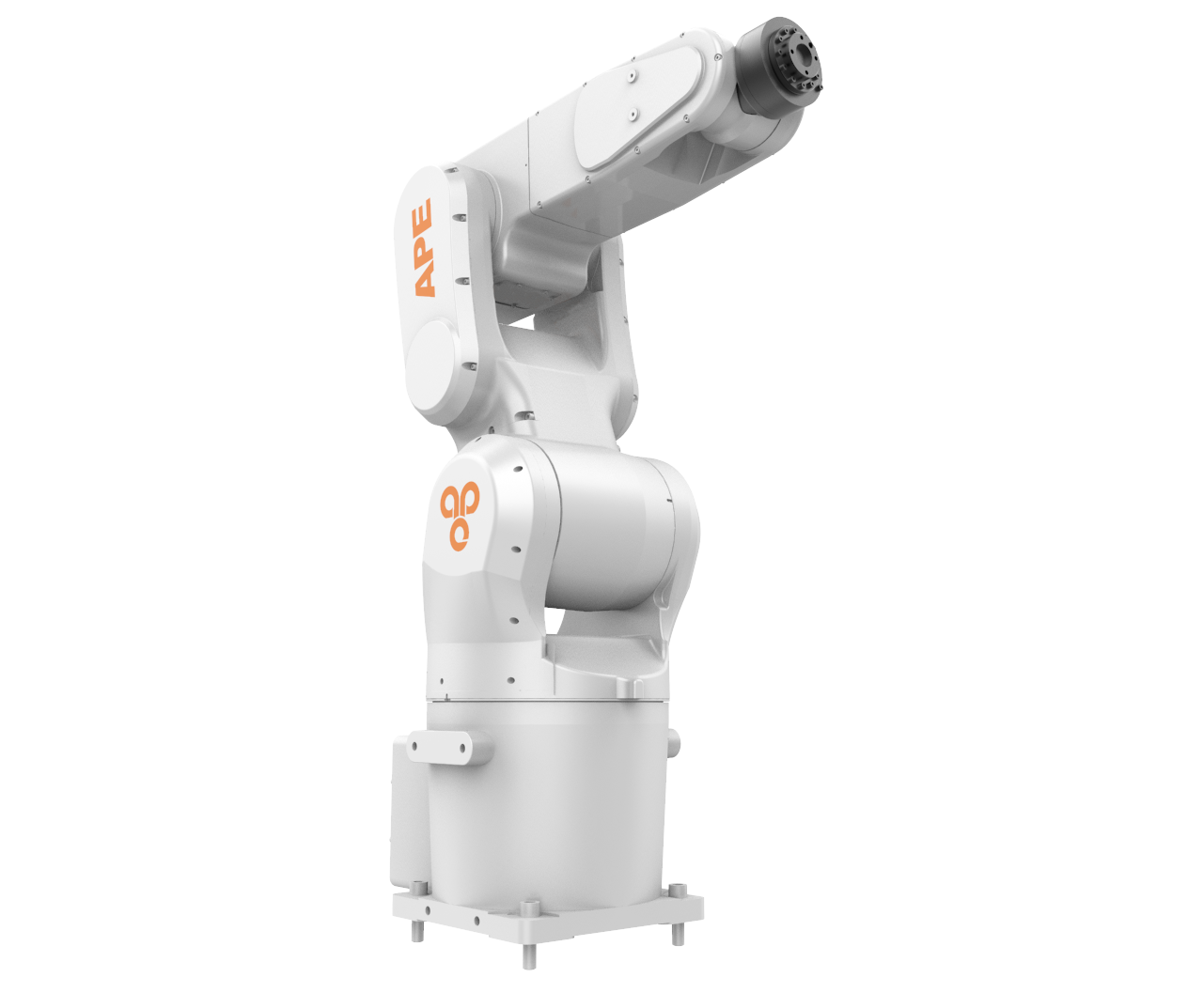
- 产品名称:SV2-6045(SV45)
- 特性:最大负载2.5 kg,臂展454 mm
- 简介:六轴工业机械手是多关节,多自由度的机器人,动作灵活,结构紧凑,便于安装配置。 稳定时间短,动态性能好,运动重复性高,本体采用内部走线,关节采用模块化设计及组装。 维护方便,可有效替代3KG以下的轻体力操作。
-

- 产品名称:SV4-6058(SV58)
- 特性:
- 简介:高刚性低惯性小包络:通过机械手臂体拓扑优化,实现了高刚性低惯性臂体;采用水平布线的方式,极大降低了机械手包络空间,方便客户系统布局及使用;造型美观:机械手本体采用无螺钉的设计理念,配合精美的流线造型,塑造工业艺术品;选型覆盖面广:580mm臂展主打产品,支持定制。形式SV4-6058安装方式桌面、吊
-
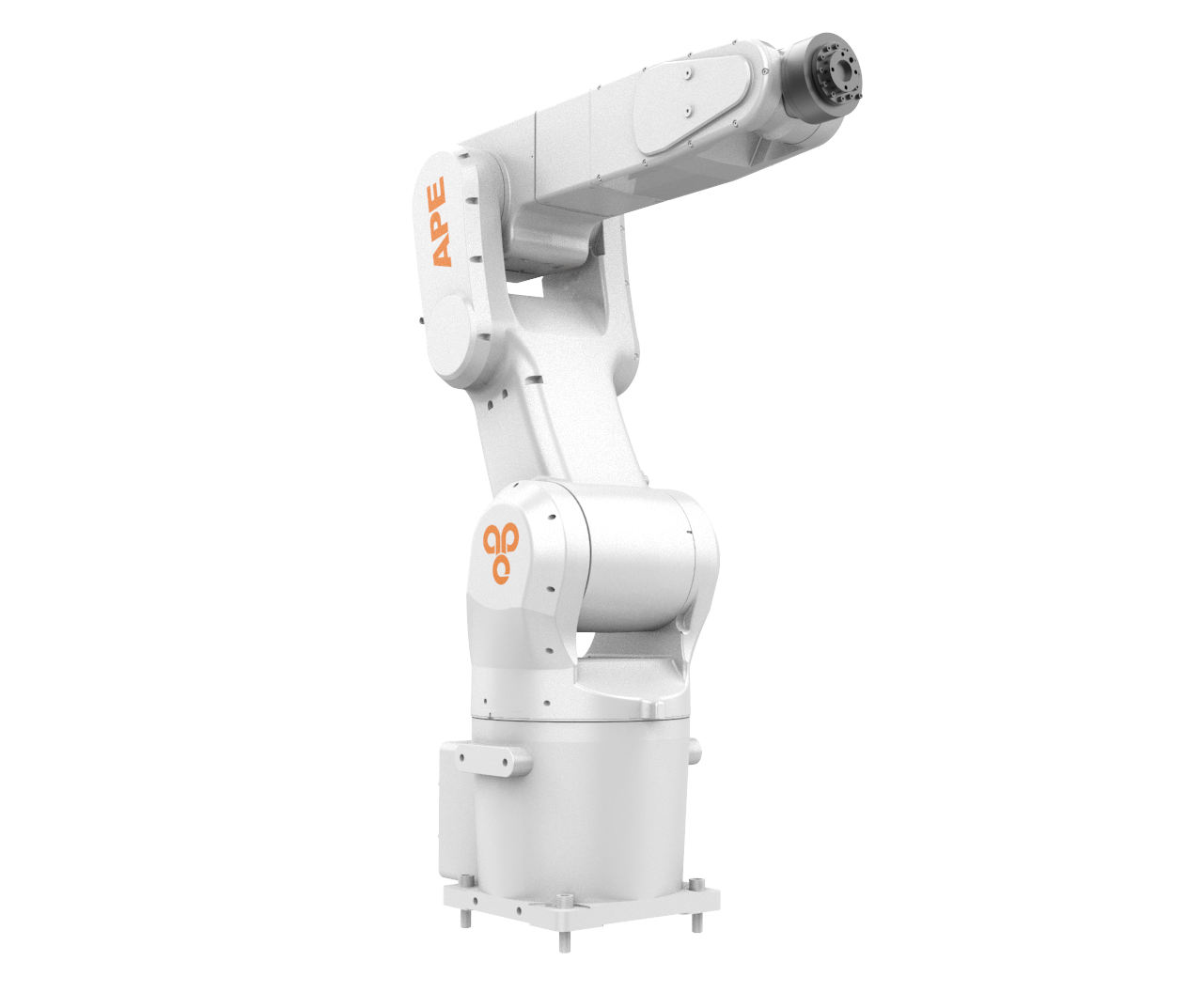
- 产品名称:SV7-6070(SV70)
- 特性:负载7Kg,臂展706mm
- 简介:六轴工业机械手是多关节,多自由度的机器人,动作灵活,结构紧凑,便于安装配置。 稳定时间短,动态性能好,运动重复性高,本体采用内部走线,关节采用模块化设计及组装。 维护方便,可有效替代7KG以下的轻体力操作。
-
- 产品名称:SV6-6090(SV90)
- 特性:
- 简介:高刚性低惯性小包络:通过机械手臂体拓扑优化,实现了高刚性低惯性臂体;采用水平布线的方式,极大降低了机械手包络空间,方便客户系统布局及使用;造型美观:机械手本体采用精美的流线造型,塑造工业艺术品;选型覆盖面广:706mm和906mm臂展两款主打产品,支持定制。形式SV6-6090(SV90)安装方式桌
-

- 产品名称:SV10-3090-HT040
- 特性:最大负载10Kg,臂展906mm
- 简介:三、四轴工业机器人是多关节,多自由度的机器人,动作灵活,结构紧凑,便于安装配置。 稳定时间短,动态性能好,运动重复性高,本体采用内部走线,关节采用模块化设计及组装。 维护方便,可有效替代10KG以下的体力操作。
-

- 产品名称:SV10-4090-HT040
- 特性:最大负载10Kg,臂展906mm
- 简介:三、四轴工业机器人是多关节,多自由度的机器人,动作灵活,结构紧凑,便于安装配置。 稳定时间短,动态性能好,运动重复性高,本体采用内部走线,关节采用模块化设计及组装。 维护方便,可有效替代10KG以下的体力操作。
上一页第1/1页下一页